A la publicació s’explica com fer un carro de control remot econòmic, però potent, que l’usuari pot maniobrar a l’esquerra, a la dreta, cap endavant i cap enrere, segons es requereixi, mitjançant el telèfon remot donat. La idea no depèn d’un circuit de microcontroladors.
En una de les meves publicacions anteriors vaig parlar sobre senzill circuit de cotxes de joguina controlat a distància , la idea actual d’un carro controlat a distància s’inspira en el mateix concepte, però està pensada per ser utilitzada per transportar càrregues formidables i molt més pesades.
Carro controlat a distància per a punts de venda
Aquest disseny pot ser específicament adequat i aplicable per a centres comercials o botigues on es pot implementar com a petit vehicle de transport per transportar material dins del recinte o el recinte amb l’ajut d’unes premses de la unitat Tx remota.
El primer pas per construir el carretó controlat a distància proposat seria adquirir un conjunt de mòduls RF Rx / Tx estàndard, ja sigui des del vostre distribuïdor electrònic local o des de qualsevol botiga en línia. Us recomano comprar en una botiga en línia, ja que seria molt més fàcil i còmode. , encara que més car.
Les unitats adquirides serien les següents:
Utilitzant els mòduls Tx, Rx de 433 MHz

La unitat de color marró de l’esquerra és la Tx o la unitat transmissora, mentre que el circuit adjunt ampli és la Rx o la unitat receptora.
La unitat Tx es pot veure amb 4 botons de color vermell marcats com A, B, C, D i es pot veure que la placa Rx té 4 relés (caixes de color negre).
Els quatre botons respectius del mòdul Tx s’acoblen sense fils per accionar els quatre relés corresponents del mòdul Rx.
Podeu veure connectors fixats al voltant de les vores de la placa (de color verd), aquests connectors es finalitzen adequadament amb les entrades de subministrament (+) (-) per a la placa Rx i també amb els contactes de relés, per a tots els 4 relés.
Un relé, com tots sabem, consta de 5 contactes bàsics i els seus pinouts, a saber: 2 pins per a la bobina, un per al pal i un per al N / C i el N / O.
Com que hi ha 4 relés a la unitat Rx, podreu trobar 5 x 4 = 20 sortides associades als punts de connexió rellevants.
Podria ser una tasca tediosa localitzar per separat aquestes terminacions del relé als connectors, per la qual cosa recomano soldar els cables directament als pinouts del relé per tal d’estalviar-vos de la tasca anterior. Aquest esforç serà necessari més endavant mentre connectem la unitat amb el circuit de control del carro.
Construint el circuit de control de relés per al carro
Per a això, necessitareu un grapat de relés i díodes. Els relés s’han de classificar correctament per poder manejar els motors de rodes d’alta potència del carretó. Es recomana utilitzar relés OEN make per a això, com es mostra a la imatge següent:

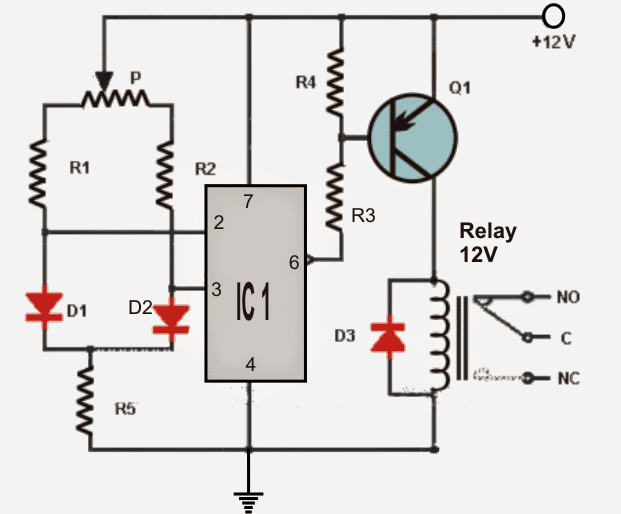
Els díodes que es requeriran al circuit del controlador de relés poden ser els nostres díodes estàndard 1N4007.
Els detalls del circuit per al mateix es poden veure al següent esquema:
Detalls i esquema del cablejat del relé


Com funciona el circuit de carretons remots
Utilitzant els relés i els díodes especificats anteriorment, haureu d'acabar de construir la placa de circuits del controlador de relés anterior, que es pot fer simplement en un tros de veroboard.
Després d'això, tenim a la nostra disposició una tasca important: integrar els cables verds que es mostren al diagrama anterior amb la placa Rx del control remot.
Abans de la integració haurem d’inserir algunes modificacions al mòdul Rx, tal com s’explica a continuació:
Utilitzant trossos de cables aïllats, pelats i estanyats adequadament als extrems, connecteu (soldant) tots els passadors polars del relé i enllaceu aquesta unió comuna amb la línia positiva de la placa Rx.
Ara, en aquesta situació, podem suposar que quan els relés no es troben en un estat activat (a través del telèfon remot), l’entrada positiva del pol de cada relé es vincularà als seus respectius punts N / C i, quan s’activi, el positiu des del pol canvieu i connecteu-vos amb els punts N / O rellevants.
En resum, en activar-lo, el contacte N / O rebrà el subministrament positiu i, per tant, ens interessa aquest subministrament positiu dels contactes N / O, ja que només s’iniciaran quan s’activen els relés, cosa que implica que quan el Tx (transmissor ) es premen els botons.
Per tant, tots els pinouts N / O rellevants s'han d'unir als cables verds del circuit de control de relé indicat anteriorment.
Un cop fet això, el Rx s'integrarà amb el mòdul del controlador de relés per executar totes les maniobres previstes del carretó controlat a distància, és a dir: els moviments cap endavant, enrere, moviments i els girs esquerre, dret.
Alimentació de la placa de control del relé
Atès que els relés a l’etapa del controlador de relés serien els responsables del moviment dels motors pesats connectats amb la roda del carro, el subministrament per a això hauria de ser igualment fort, per tant, les bateries de plom àcid de cicle profund s’adapten perfectament a aquesta aplicació.
Suposant que els motors es classifiquin a 12V, una bateria de plom àcid de 40AH seria prou bona per permetre que el carretó es mogués fins i tot amb càrregues més pesades.
Configuració de les rodes amb els motors per a les maniobres previstes
Com es pot identificar a la figura següent, el carro de control remot que es discuteix necessitarà 4 rodes per transportar i enrotllar el sistema.
Tanmateix, només les dues rodes davanteres serien les responsables de permetre les maniobres previstes de marxa enrere, endavant, dreta i esquerra i, per tant, caldria fixar els motors amb aquestes dues rodes davanteres del carretó, com es mostra a la imatge següent:

Configuració de les connexions de les rodes del carro
Les rodes posteriors són només rodes fictícies, fixades només per permetre el lliure rodament del carro, en resposta a les ordres de la roda davantera.
Com es pot observar a la imatge anterior, el mòdul marcat com a muntatge de PCB és la placa del controlador de relé, el mòdul remot significa la placa del receptor remot Rx, mentre que la bateria és la bateria de 40 AH 12V que hem comentat a la secció anterior de l’article.
Després del muntatge, és possible que hagueu de modificar i comprovar les connexions del cable del motor amb la placa del controlador del relé.
Per a un moviment cap endavant i cap enrere, els motors han d'estar sincronitzats entre ells; en canvi, per executar una tirada dreta o esquerra, els motors han de passar per un moviment de rotació oposat.
Si trobeu que el motor no es comporta de la manera anterior, és probable que el corregiu simplement canviant la polaritat d’un dels motors. Això corregirà immediatament la situació i obligarà els motors a implementar les maniobres especificades.
Finalment, els botons A. B, C, D es poden fer coincidir o intercanviar adequadament per a qualsevol de les respectives maniobres ajustant els enllaços de fil verd amb el mòdul Rx, segons les preferències personals dels usuaris.
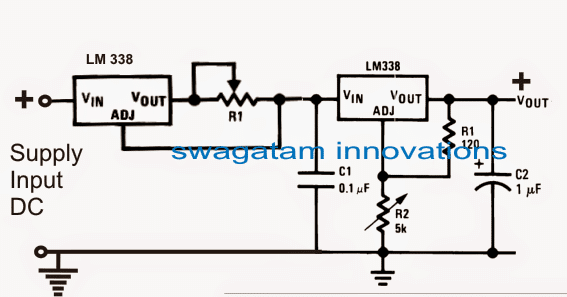
Anterior: Com es modifica SMPS per a la sortida de corrent i tensió ajustables Següent: Sensor de microones o circuit de sensor Doppler