Aquest útil circuit de tacòmetre analògic lleuger ha estat desenvolupat per facilitar la reparació de vehicles mecànics o automobilístics per ajustar amb precisió les RPM d’un sistema d’encesa del cotxe per obtenir-ne la màxima eficiència. El circuit proposat és en realitat un disseny combinat d'un TACHOMETER i un mesurador.
Aplicació
El circuit del tacòmetre analògic es pot aplicar per analitzar la sincronització de l’encesa a diversos RPM, juntament amb un llum de cronometratge. Quan el circuit s’utilitza en forma de mesurador de permanència, es pot utilitzar per llegir l’angle en què s’activa el pols d’encesa i, per tant, pot proporcionar la informació necessària al mecànic automàtic sobre l’ajust de temporització del circuit CDI.
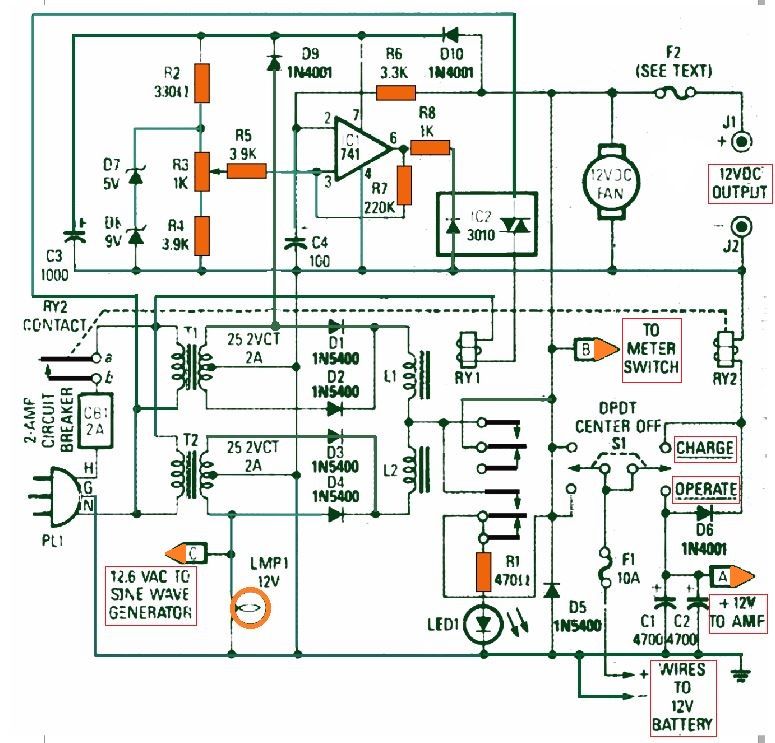
La configuració completa es mostra a la figura següent i està dissenyada per a automòbils o automòbils que tenen un sistema de terra negatiu, que tenen la majoria dels cotxes contemporanis.
La idea també es pot adaptar a vehicles terrestres positius connectant tots els díodes i condensadors electrolítics amb polaritat inversa i substituint els transistors PNP per NPN i viceversa. El circuit s’alimenta mitjançant la pròpia alimentació de la bateria del cotxe. El funcionament del circuit es pot entendre amb els punts següents:
Com funciona el circuit

Si us plau, canvieu els pins emissor / col·lector del T7, que no s’orienta correctament al diagrama
Els transistors T1 i T2 estan equipats com a disparador Schmitt. Mentre no es detecti cap impuls positiu a l’entrada de la bobina de captació, T1 es manté apagat i T2 s’encén, cosa que significa que T4 també està encès. Això fa que es generi una tensió positiva corresponent a la tensió d'alimentació de la bateria menys la tensió de l'emissor base T4 a l'emissor T4.
No obstant això, quan es genera un impuls positiu des de la bobina de captació, s'activa T1 i el disparador de Schmitt commuta de manera contrària.
En aquest punt, T4 està apagat i fa que la tensió existent al seu emissor sigui nul·la. El voltatge mitjà de l’emissor T4 és, com a resultat, proporcional a la relació del temps d’encesa ON / OFF de la bobina de captació, és a dir, o en altres paraules, aquest valor de tensió està determinat per l’angle de permanència.
Quan l’interruptor S1 està en posició “a”, el corrent mitjà a través del mesurador també dependrà de l’angle de permanència, de manera que el mesurador es podria graduar linealment respecte a l’angle de permanència.
Quan l'interruptor està en posició 'b', el circuit simplement funciona com un tacòmetre. C2 funciona com un diferenciador per als impulsos provinents del col·lector T3 i la sortida resultant s’utilitza per activar un escenari monoestable construït al voltant dels transistors T5 i T6.
El monoestable genera una sortida PWM constant, però, a mesura que augmenta el RPM del motor, també augmenta el cicle de treball dels polsos. El voltatge mitjà de l'emissor T7 i, per tant, el corrent mitjà a través del mesurador, ara depèn de la proporció del període de 'pols' a 'sense pols'. Això significa que a mesura que el r.p.m. augmenta i l'amplada de les pulsacions s'amplia, el corrent a través del mesurador també augmenta linealment.
Com calibrar
El dispositiu es podria calibrar de la següent manera: Amb S1 a la posició 'a', connecteu l'entrada R1 a la línia de terra i, a continuació, afineu P1 per obtenir una deflexió a escala completa del mesurador. Això esdevé equivalent a un angle de permanència de 360 ° i l’escala es podria calibrar linealment de 0 a 360 graus.
L'escala del tacòmetre s'ha de calibrar amb una escala completa de manera que correspongui a la rpm òptima més alta. Per a la majoria de les aplicacions, 8000 podrien ser adequades.
Si l’eina s’ha d’aplicar a motors de quatre i sis cilindres, en aquest cas pot ser que siguin necessaris un parell d’escales o bé que S1 hagi de ser substituït per un interruptor de 3 pols i que s’hagi de replicar P2 per correspondre a una escala per a diverses gammes de motors. Això es deu al fet que un motor de sis cilindres genera proporcionalment molts més impulsos per a una velocitat de rotació específica.
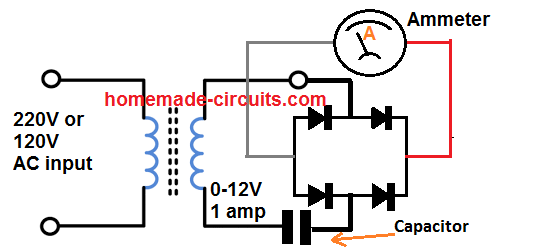
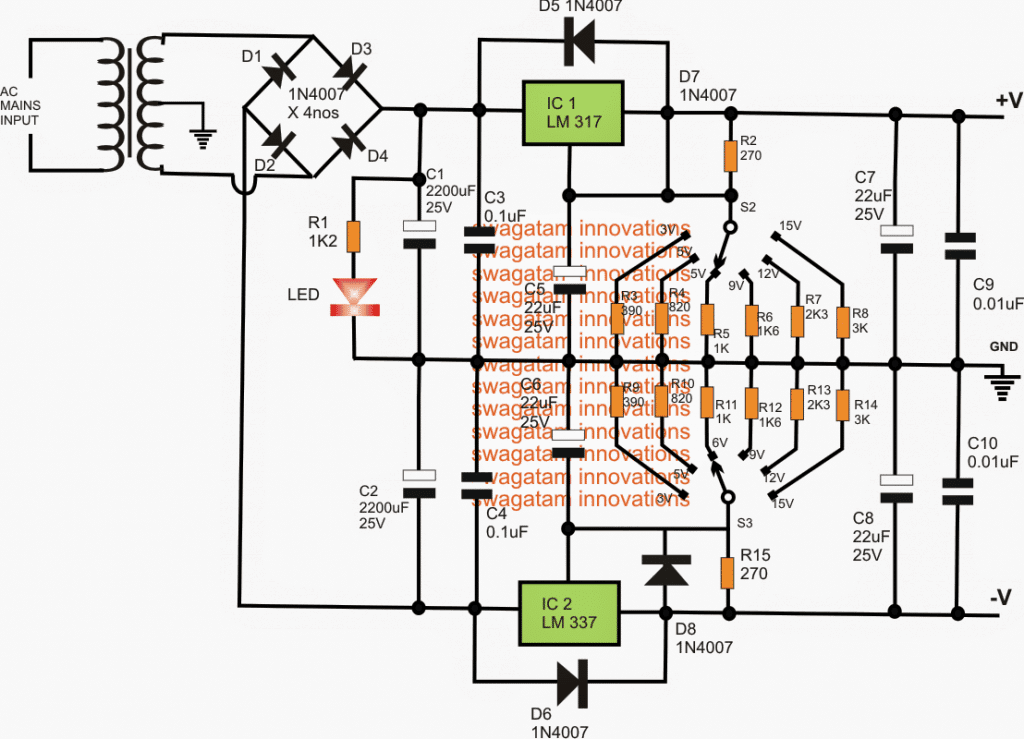
El dispositiu es podria calibrar amb l'ajuda del circuit bàsic del transformador / pont mostrat, que produeix una forma d'ona de 100 Hz.

La freqüència de 100 Hz esdevé equivalent a 3000 r.p.m. per a un motor de quatre cilindres i 2000 r.p.m. per a un motor de sis cilindres. La sortida d’aquest circuit s’adjunta a l’entrada del dispositiu del tacòmetre analògic i P2 es modifica per optimitzar una deflexió i lectura precisa al comptador.
Anterior: Circuit de control de llum estroboscòpica de xenó Següent: circuit de SAI d’ona senoidal de 50 watts