
Gairebé tots els desenvolupaments mecànics que veiem al nostre voltant s’aconsegueixen mitjançant un motor elèctric. Les màquines elèctriques són un mètode de conversió d’energia. Els motors agafen energia elèctrica i produeixen energia mecànica. Els motors elèctrics s’utilitzen per alimentar centenars de dispositius que fem servir a la vida quotidiana. Els motors elèctrics es classifiquen en dues categories diferents: el motor de corrent continu (CC) i el motor de corrent altern (AC). En aquest article, analitzarem el motor de corrent continu i el seu funcionament. I també com funcionen els motors de corrent continu.
Què és el motor de corrent continu?
A El motor de corrent continu és un motor elèctric que funciona amb corrent continu. En un motor elèctric, el funcionament depèn d’un simple electromagnetisme. Un conductor que transporta corrent genera un camp magnètic, quan aquest es col·loca en un camp magnètic extern, es trobarà amb una força proporcional al corrent del conductor i a la força del camp magnètic extern. És un dispositiu que converteix l’energia elèctrica en energia mecànica. Funciona sobre el fet que un conductor que transporta corrent situat en un camp magnètic experimenta una força que fa que giri respecte a la seva posició original. El pràctic motor de corrent continu consisteix en bobinatges de camp per proporcionar el flux magnètic i l'armadura que actua com a conductor.

Motor de corrent continu sense escombretes
L'entrada de un motor de corrent continu sense escombretes és corrent / tensió i la seva sortida és parell. La comprensió del funcionament del motor de corrent continu és molt senzilla a partir d’un diagrama bàsic que es mostra a continuació. El motor de corrent continu consisteix bàsicament en dues parts principals. La part giratòria s’anomena rotor i la part estacionària també s’anomena estator. El rotor gira respecte a l’estator.
El rotor està format per bobinatges, els bobinats s’associen elèctricament al commutador. La geometria dels pinzells, els contactes del commutador i els bobinats del rotor són tals que quan s’aplica l’alimentació, les polaritats del bobinat energitzat i dels imants de l’estator estan desalineades i el rotor girarà fins que estigui gairebé redreçat amb els imants de camp de l’estator.
A mesura que el rotor assoleix l'alineació, els raspalls es mouen als contactes del commutador següent i activen el següent bobinat. La rotació inverteix la direcció del corrent a través del bobinat del rotor, provocant un gir del camp magnètic del rotor, impulsant-lo a seguir girant.
Construcció de motor de corrent continu
La construcció del motor de corrent continu es mostra a continuació. És molt important conèixer el seu disseny abans de saber que funciona. Les parts essencials d’aquest motor inclouen la indústria i l’estator.

DC MOTOR
La bobina d'armadura és la part giratòria mentre que la part estacionària és l'estator. En aquest cas, la bobina d'armat està connectada a l'alimentació de CC que inclou els raspalls i els commutadors. La funció principal del commutador és convertir el corrent altern en corrent continu que s’indueix a l’induit. El flux de corrent es pot subministrar utilitzant el raspall des de la part rotativa del motor cap a la càrrega exterior inactiva. La disposició de la armadura es pot fer entre els dos pols de l’electroimant o permanent.
Parts del motor de CC
Als motors de corrent continu, hi ha diferents dissenys populars de motors disponibles com un imant permanent sense escombretes, sèries, enrotllament compost, derivació, derivació estabilitzada. En general, les parts del motor de corrent continu són les mateixes en aquests dissenys populars, però tot el seu funcionament és el mateix. Les parts principals del motor de corrent continu són les següents.
Estator
Una part estacionària com un estator és una de les parts de les parts del motor de corrent continu que inclou els bobinats de camp. La funció principal d’això és obtenir el subministrament.
Rotor
El rotor és la part dinàmica del motor que s’utilitza per crear les revolucions mecàniques de la unitat.
Raspalls
Els raspalls que utilitzen un commutador funcionen principalment com a pont per fixar el circuit elèctric estacionari cap al rotor.
Conmutador
És un anell dividit dissenyat amb segments de coure. També és una de les parts més essencials del motor de corrent continu.
Serpents de camp
Aquests bobinatges es fabriquen amb bobines de camp conegudes com a fils de coure. Aquests bobinatges arrodoneixen aproximadament les ranures portades a través de les sabates de pal.
Bobinatges d'armadura
La construcció d’aquests bobinatges al motor de corrent continu és de dos tipus, com Lap & Wave.
Jou
Un marc magnètic com un jou es dissenya de vegades amb ferro colat o acer. Funciona com un guàrdia.
Polonesos
Els pals del motor inclouen dues parts principals com el nucli del pal i les sabates del pal. Aquestes parts essencials estan connectades entre elles mitjançant la força hidràulica i estan connectades al jou.
Dents / ranura
Els revestiments no conductors de ranures es troben sovint embussats entre les parets de les ranures, així com bobines per protegir-los des de zero, suport mecànic i aïllament elèctric addicional. El material magnètic entre les ranures s’anomena dents.
Carcassa del motor
La carcassa del motor dóna suport als raspalls, als coixinets i al nucli de ferro.
Principi de funcionament
Una màquina elèctrica que s’utilitza per convertir l’energia elèctrica en mecànica es coneix com a motor de corrent continu. El Principi de funcionament del motor de corrent continu és que quan un conductor que transporta corrent es troba dins del camp magnètic, experimenta una força mecànica. Aquesta direcció de la força es pot decidir a través de la regla de l’esquerra de Flemming, així com de la seva magnitud.
Si el primer dit s’estén, el segon dit, així com el polze de la mà esquerra, seran verticals entre si i el dit principal significa la direcció del camp magnètic, el dit següent significa la direcció actual i el tercer dit semblant al dit indica direcció de força que s’experimenta a través del conductor.
F = BIL Newtons
On,
'B' és la densitat de flux magnètic,
‘Jo’ és actual
‘L’ és la longitud del conductor al camp magnètic.
Sempre que es dóna un bobinatge d'armadura cap a un subministrament de corrent continu, el flux de corrent s'establirà dins del bobinat. Els bobinats de camp o els imants permanents proporcionaran el camp magnètic. Per tant, els conductors d’armadura experimentaran una força a causa del camp magnètic basat en el principi esmentat anteriorment.
El commutador està dissenyat com a seccions per aconseguir un parell unidireccional o el camí de la força s’hauria bolcat cada vegada que el camí del moviment del conductor es capgira dins del camp magnètic. Per tant, aquest és el principi de funcionament del motor de corrent continu.
Tipus de motors de corrent continu
A continuació es descriuen els diferents tipus de motors de corrent continu.
Motors de corrent continu
Els motors reduïts tendeixen a reduir la velocitat del motor, però amb el corresponent augment del parell. Aquesta propietat és útil, ja que els motors de corrent continu poden girar a velocitats massa ràpides perquè un dispositiu electrònic faci servir. Els motors d'engranatges solen consistir en un motor de raspall de corrent continu i una caixa de canvis unida a l'eix. Els motors es distingeixen engranats per dues unitats connectades. Té moltes aplicacions pel seu cost de disseny, redueix la complexitat i la construcció d'aplicacions com ara equips industrials, actuadors, eines mèdiques i robòtica.
- Mai no es pot construir cap robot bo sense engranatges. Tot i això, és molt important una bona comprensió de com afecten els engranatges a paràmetres com el parell i la velocitat.
- Els engranatges funcionen segons el principi d’avantatge mecànic. Això implica que, mitjançant l'ús de diàmetres diferencials d'engranatges, podem intercanviar entre la velocitat de rotació i el parell. Els robots no tenen una relació desitjable entre velocitat i parell.
- En robòtica, el parell és millor que la velocitat. Amb engranatges, és possible intercanviar l’alta velocitat amb un millor parell. L’increment del parell és inversament proporcional a la reducció de la velocitat.

Motors de corrent continu
Reducció de la velocitat del motor de corrent continu
La reducció de la velocitat dels engranatges consisteix en una petita marxa que condueix una marxa més gran. És possible que hi hagi pocs conjunts d’aquests conjunts d’engranatges de reducció en una caixa de canvis.

Reducció de la velocitat del motor de corrent continu
De vegades, l’objectiu d’utilitzar un motor d’engranatges és reduir la velocitat de l’eix de rotació d’un motor al dispositiu que s’està conduint, per exemple en un petit rellotge elèctric on el petit motor síncron gira a 1.200 rpm, però es redueix a 1 rpm per accionar la segona i reduïda encara més en el mecanisme del rellotge per conduir les agulles de minuts i hores. Aquí la quantitat de força motora és irrellevant sempre que sigui suficient per superar els impactes de fricció del mecanisme del rellotge.
Motor de sèrie DC
Un motor de la sèrie és un motor de la sèrie DC on el bobinatge de camp es connecta internament en sèrie al bobinat de la armadura. El motor de la sèrie proporciona un parell d’arrencada elevat, però mai no s’ha de fer funcionar sense càrrega i és capaç de moure càrregues d’eix molt grans quan s’energia per primera vegada. Els motors de sèrie també es coneixen com a motors de bobina en sèrie.
En els motors de sèrie, els bobinats de camp s’associen en sèrie amb l’armat. La intensitat del camp varia amb les progressions del corrent de la armadura. En el moment en què la seva velocitat es redueix en una càrrega, el motor de la sèrie avança un parell més excel·lent. El seu parell d’arrencada és més que diferents tipus de motors de corrent continu.
També pot emetre més fàcilment la calor acumulada en el bobinatge a causa d’una gran quantitat de corrent que es transporta. La seva velocitat varia considerablement entre la càrrega completa i la no càrrega. Quan s’elimina la càrrega, augmenta la velocitat del motor i disminueix el corrent a través de les bobines d’armadura i de camp. El funcionament descarregat de les màquines grans és perillós.

sèries Motor
El corrent a través de les bobines d'armament i de camp disminueix, la força de les línies de flux que l'envolten es debilita. Si la força de les línies de flux al voltant de les bobines es reduís al mateix ritme que el corrent que circula per elles, ambdues disminuirien al mateix ritme a
que augmenta la velocitat del motor.
Avantatges
Els avantatges d’un motor de sèrie inclouen els següents.
- Parell inicial enorme
- Construcció senzilla
- Dissenyar és fàcil
- El manteniment és fàcil
- Econòmic
Aplicacions
Els motors de la sèrie poden produir una enorme potència de gir, el parell des del seu estat de ralentí. Aquesta característica fa que els motors de la sèrie siguin adequats per a aparells elèctrics petits, equips elèctrics versàtils, etc. Els motors de la sèrie no són adequats quan es necessita una velocitat constant. La raó és que la velocitat dels motors de la sèrie varia molt amb càrregues variables.
Motor de derivació
Els motors de derivació són motors de derivació de corrent continu, on els bobinats de camp derivats o connectats en paral·lel al bobinat del motor. El motor de derivació de corrent continu s’utilitza habitualment a causa de la seva millor regulació de velocitat. Per tant, tant el bobinat de la indústria com els bobinats de camp es presenten a la mateixa tensió d’alimentació, però hi ha branques discretes per al corrent de corrent de la armadura i el corrent de camp.
Un motor de derivació té unes característiques de treball una mica distintives que un motor de sèrie. Atès que la bobina del camp de derivació està feta de filferro fi, no pot produir un gran corrent per arrencar com el camp de la sèrie. Això implica que el motor de derivació té un parell d’arrencada extremadament baix, la qual cosa requereix que la càrrega de l’eix sigui força petita.

Motor de derivació
Quan s'aplica tensió al motor de derivació, una quantitat molt baixa de corrent flueix a través de la bobina de derivació. L'armadura del motor de derivació és similar al motor de la sèrie i atraurà corrent per produir un fort camp magnètic. A causa de la interacció del camp magnètic al voltant de l'armadura i el camp produït al voltant del camp de derivació, el motor comença a girar.
Igual que el motor de la sèrie, quan l'armadura comença a girar, produirà CEM de nou. La CEM posterior farà que el corrent a l'armat comenci a disminuir fins a un nivell molt petit. La quantitat de corrent que generarà l'armadura està directament relacionada amb la mida de la càrrega quan el motor aconsegueix la màxima velocitat. Com que la càrrega és generalment petita, el corrent de la indústria serà petit.
Avantatges
Els avantatges del motor de derivació inclouen els següents.
- Rendiment de control senzill, que resulta en un alt nivell de flexibilitat per resoldre problemes complexos de la unitat
- Alta disponibilitat, per tant, cal un mínim esforç de servei
- Alt nivell de compatibilitat electromagnètica
- Funcionament molt suau, per tant baixa tensió mecànica del sistema general i elevats processos de control dinàmic
- Àmplia gamma de control i velocitats baixes, per tant universalment utilitzables
Aplicacions
Els motors de derivació continu són molt adequats per a aplicacions accionades per corretja. Aquest motor de velocitat constant s’utilitza en aplicacions industrials i automobilístiques, com ara màquines eina i màquines de bobinatge / desenrotllament, on es requereix una gran precisió de parell.
Motors compostos de CC
Els motors compostos de CC inclouen un camp de derivació excitat per separat que té un excel·lent parell d’arrencada, tot i que afronta problemes dins de les aplicacions de velocitat variable. El camp d'aquests motors es pot connectar en sèrie a través de l'armat i un camp de derivació excitat per separat. El camp de la sèrie proporciona un parell d’arrencada superior, mentre que el camp de derivació proporciona una regulació de la velocitat millorada. Però, el camp de la sèrie provoca problemes de control dins de les aplicacions de la unitat de velocitat variable i normalment no s’utilitza en les unitats de quatre quadrants.
Emocionat per separat
Com el seu nom indica, els bobinatges de camp en cas contrari, les bobines s'energitzen a través d'una font de CC separada. L'únic fet d'aquests motors és que el corrent d'armadura no subministra a través dels bobinats de camp, ja que el bobinatge de camp es reforça a partir d'una font de corrent de CC externa independent. L’equació de parell del motor de corrent continu és Tg = Ka φ Ia, en aquest cas, el parell es canvia mitjançant el canvi de flux presentat ‘φ’ i independentment del corrent d’armatura ‘Ia’.
Emocionat
Com el seu nom indica, en aquest tipus de motors, el corrent dins dels bobinats es pot subministrar a través del mateix motor. A més, aquest motor es separa en el motor de sèrie enrotllat i enrotllat de derivació.
Motor de continu imant permanent
El motor PMDC o imant permanent de corrent continu inclou un bobinat d’armadura. Aquests motors estan dissenyats amb imants permanents col·locant-los al marge interior del nucli de l’estator per generar el flux de camp. D'altra banda, el rotor inclou una armadura de CC convencional que inclou pinzells i segments de commutador.
En un motor de continu imant permanent, el camp magnètic es pot formar a través d’un imant permanent. Per tant, el corrent d'entrada no s'utilitza per a l'excitació que s'utilitza en condicionadors d'aire, eixugaparabrises, arrencadors d'automòbils, etc.
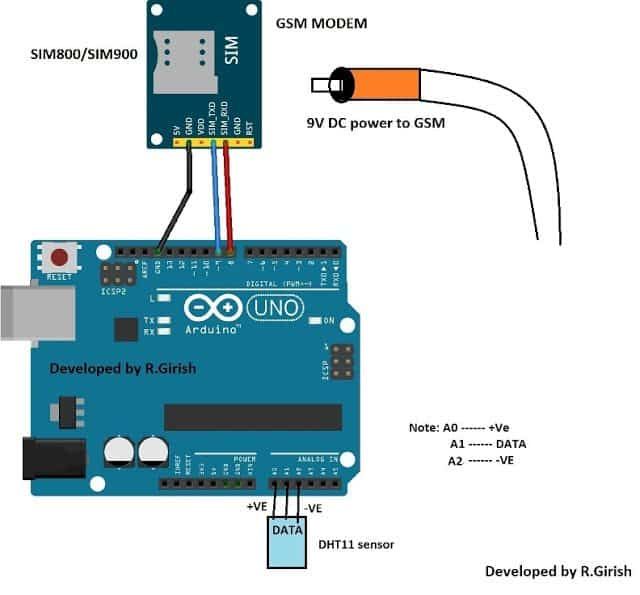
Connexió del motor CC amb microcontrolador
Els microcontroladors no poden accionar els motors directament. Per tant, necessitem algun tipus de conductor per controlar la velocitat i la direcció dels motors. Els conductors del motor actuaran com a dispositius d'interfície entre microcontroladors i motors . Els conductors de motor actuaran com a amplificadors de corrent, ja que prenen un senyal de control de baix corrent i proporcionen un senyal de corrent elevat. Aquest senyal d’alta intensitat s’utilitza per accionar els motors. L’ús del xip L293D és una manera fàcil de controlar el motor mitjançant un microcontrolador. Conté dos circuits de controladors de pont H internament.
Aquest xip està dissenyat per controlar dos motors. L293D té dos conjunts d’arranjaments en què 1 conjunt té entrada 1, entrada 2, sortida 1, sortida 2, amb pin d’activació, mentre que un altre conjunt té entrada 3, entrada 4, sortida 3, sortida 4 amb un altre pin d’activació. Aquí teniu un vídeo relacionat amb L293D
A continuació, es mostra un exemple de motor de CC que té una interfície amb el microcontrolador L293D.

Motor de CC interfaçat amb el microcontrolador L293D
L293D té dos conjunts d’arranjaments en què un conjunt té entrada 1, entrada 2, sortida 1 i sortida 2 i un altre conjunt té entrada 3, entrada 4, sortida 3 i sortida 4, segons el diagrama anterior,
- Si els pins no 2 i 7 són alts, els pins 3 i 6 també són alts. Si l’activació 1 i el pin número 2 són alts deixant el pin número 7 tan baix, el motor gira en la direcció cap endavant.
- Si l’activació 1 i el pin número 7 són alts deixant el pin número 2 tan baix, el motor gira en sentit invers.
Avui en dia els motors de corrent continu es troben en moltes aplicacions tan petites com joguines i discs o en mides grans per fer funcionar laminadors d’acer i màquines de paper.
Equacions del motor de corrent continu
La magnitud del flux experimentat és de
F = BlI
On, B- Densitat de flux a causa del flux produït pels bobinatges de camp
l- Longitud activa del conductor
I-Corrent que passa pel conductor
A mesura que el conductor gira, s’indueix un CEM que actua en una direcció oposada a la tensió subministrada. Es dóna com

On, Ø- Fluz per les bobinades del camp
P- Nombre de pols
A-A constant
N - Velocitat del motor
Z- Nombre de conductors
La tensió d'alimentació, V = Eb+ JoaRa
El parell desenvolupat és de
 Per tant, el parell és directament proporcional al corrent d'armadura.
Per tant, el parell és directament proporcional al corrent d'armadura.
A més, la velocitat varia amb el corrent d'armatura, de manera que indirectament el parell i la velocitat d'un motor depenen l'un de l'altre.
Per a un motor de derivació de corrent continu, la velocitat es manté gairebé constant, fins i tot si el parell augmenta de no carregar a plena càrrega.
Per a un motor de la sèrie DC, la velocitat disminueix a mesura que augmenta el parell de pas de càrrega a plena càrrega.
Així, el parell es pot controlar variant la velocitat. El control de velocitat s'aconsegueix mitjançant
- Canvi de flux controlant el corrent mitjançant bobinatge de camp: mètode de control de flux. Mitjançant aquest mètode, la velocitat es controla per sobre de la seva velocitat nominal.
- Control de tensió de la indústria: proporciona control de velocitat per sota de la seva velocitat normal.
- Control de tensió de subministrament: proporciona control de velocitat en ambdues direccions.
4 Operació Quadrant
Generalment, un motor pot funcionar en 4 regions diferents. El funcionament de quatre quadrants del motor de corrent continu inclou el següent.
- Com a motor cap endavant o en sentit horari.
- Com a generador en direcció cap endavant.
- Com a motor en sentit invers o en sentit antihorari.
- Com a generador en sentit invers.

4 Funcionament quadrant del motor de corrent continu
- Al primer quadrant, el motor condueix la càrrega amb la velocitat i el parell en una direcció positiva.
- Al segon quadrant, la direcció del parell inverteix i el motor actua com a generador
- Al tercer quadrant, el motor acciona la càrrega amb velocitat i parell en direcció negativa.
- Al 4thquadrant, el motor actua com a generador en mode invers.
- Al primer i al tercer quadrant, el motor actua en direccions cap endavant i cap enrere. Per exemple, motors en grues per aixecar la càrrega i deixar-la caure.
Al segon i quart quadrant, el motor actua com a generador en direccions cap endavant i cap enrere, respectivament, i proporciona energia de tornada a la font d'energia. Per tant, la manera de controlar una operació del motor, de fer-la operar en qualsevol dels quatre quadrants és controlant la seva velocitat i el seu sentit de gir.
La velocitat es controla variant la tensió de la armadura o afeblint el camp. La direcció del parell o la direcció de rotació es controla variant la mesura en què la tensió aplicada és superior o inferior a l’emf posterior.
Falles habituals en motors de corrent continu
És important conèixer i comprendre les avaries i falles del motor per descriure els dispositius de seguretat més adequats per a cada cas. Hi ha tres tipus de fallades del motor, com la mecànica, elèctrica i mecànica, que es transformen en elèctriques. Les falles més freqüents són les següents:
- Avaria de l'aïllament
- Sobrecalentament
- Sobrecàrregues
- Fracàs del rodament
- Vibració
- Rotor bloquejat
- Desalineació de l’eix
- Cursa inversa
- Desequilibri de fase
Entre els errors més habituals que es produeixen als motors de corrent altern, així com els motors de corrent continu, s’inclouen els següents.
- Quan el motor no està muntat correctament
- Quan el motor està bloquejat per la brutícia
- Quan el motor conté aigua
- Quan el motor està sobreescalfant
Motor de 12 V CC
Un motor de 12 V CC és econòmic, petit i potent, que s’utilitza en diverses aplicacions. Seleccionar el motor de corrent continu adequat per a una aplicació en concret és una tasca difícil, per la qual cosa és molt essencial treballar amb l’empresa exacta. El millor exemple d’aquests motors són els METMotors, ja que fabriquen motors PMDC (imant permanent de CC) amb alta qualitat des de fa més de 45 anys.
Com seleccionar el motor adequat?
La selecció d’un motor de 12 V CC es pot fer molt fàcilment mitjançant METmotors, ja que els professionals d’aquesta empresa estudiaran primer la vostra aplicació correcta i, després, consideraran nombroses característiques i especificacions per garantir el millor producte possible.
La tensió de funcionament és una de les característiques d’aquest motor.
Una vegada que el motor funciona mitjançant bateries, normalment es trien baixes tensions de funcionament, ja que són necessàries menys cèl·lules per obtenir el voltatge concret. Però, a altes tensions, conduir un motor de corrent normal és més eficient. Tot i això, el seu funcionament és possible amb 1,5 volts que puja a 100V. Els motors més utilitzats són els de 6v, 12v i 24v. Altres especificacions principals d’aquest motor són la velocitat, el corrent de funcionament, la potència i el parell.
Els motors de 12 V CC són perfectes per a diferents aplicacions mitjançant un subministrament de corrent continu que requereix un parell de funcionament i un arrencada elevat. Aquests motors funcionen a menys velocitats en comparació amb altres voltatges del motor.
Les característiques d’aquest motor varien principalment en funció de l’empresa fabricant i de l’aplicació.
- La velocitat del motor és de 350 rpm a 5000 rpm
- El parell nominal d’aquest motor oscil·la entre 1,1 i 12,0 lliures
- La potència de sortida d’aquest motor oscil·la entre els 01 CV i els 21 CV
- Les mides del marc són de 60 mm, 80 mm i 108 mm
- Raspalls reemplaçables
- La vida típica del pinzell és de més de 2000 hores
Tornar CEM al motor de corrent continu
Una vegada que el conductor que transporta corrent es disposa en un camp magnètic, el parell induirà sobre el conductor i el parell girarà el conductor que tallarà el flux del camp magnètic. Basat en el fenomen de la inducció electromagnètica una vegada que el conductor talla el camp magnètic, i després induirà una CEM dins del conductor.
La direcció induïda dels CEM es pot determinar mitjançant la regla de Flemming a la dreta. Segons aquesta regla, si agafem la nostra miniatura, índex i dit central amb un angle de 90 °, després el dit índex significarà la forma del camp magnètic. Aquí, el dit polze representa la forma de moviment del conductor i el dit mig indica la CEM induïda sobre el conductor.
En aplicar la regla de Flemming a la dreta, podem observar que la direcció emf induïda és inversa a la tensió aplicada. Per tant, l’emf s’anomena emf posterior o contraemf. El desenvolupament de l’emf posterior es pot fer en sèrie mitjançant la tensió aplicada, però, en sentit invers, és a dir, l’emf posterior es resisteix al flux de corrent que el provoca.
La magnitud EMF posterior es pot donar mitjançant una expressió similar a la següent.
Eb = NP ϕZ / 60A
On
'Eb' és la CEM induïda pel motor anomenada CEM posterior
'A' és el núm. de carrils paral·lels al llarg de l'armat entre els raspalls de polaritat inversa
'P' és el núm. de pals
'N' és la velocitat
'Z' és el nombre sencer de conductors dins de la armadura
'Φ' és un flux útil per a cada pol.
En el circuit anterior, la magnitud de l’emf posterior és sempre baixa en comparació amb la tensió aplicada. La disparitat entre els dos és gairebé equivalent un cop el motor de corrent continu funciona en condicions habituals. El corrent s’induirà al motor de corrent continu a causa de l’alimentació principal. La relació entre el subministrament principal, el CEM posterior i el corrent d'armadura es pot expressar com Eb = V - IaRa.
Aplicació per controlar el funcionament del motor de CC en 4 quadrants
El control del funcionament del motor de corrent continu en 4 quadrants es pot aconseguir mitjançant un microcontrolador connectat amb 7 commutadors.

4 Control de quadrants
Cas 1: Quan es pressiona l’interruptor d’inici i de sentit horari, la lògica del microcontrolador dóna una sortida de lògica baixa al pin 7 i lògica alta al pin2, fent que el motor giri en sentit horari i funcioni a l’1cquadrant. La velocitat del motor es pot variar prement l’interruptor PWM, provocant una aplicació de polsos de durada variable al pin d’activació de l’IC del controlador, variant la tensió aplicada.
Cas 2: Quan es prem el fre cap endavant, la lògica del microcontrolador aplica la lògica baixa al pin7 i la lògica alta al pin 2 i el motor tendeix a funcionar en la seva direcció inversa, cosa que fa que s’aturi instantàniament.
De manera similar, prement l’interruptor en sentit antihorari fa que el motor es mogui en la direcció inversa, és a dir, que funcioni en el 3rdquadrant, i en prémer l’interruptor de fre de marxa enrere fa que el motor s’aturi instantàniament.
Així, mitjançant una correcta programació del microcontrolador i mitjançant interruptors, es pot controlar el funcionament del motor en cada direcció.
Per tant, es tracta d’una visió general del motor de corrent continu. El avantatges del motor de corrent continu proporcionen un control de velocitat excel·lent per a l’acceleració i la desacceleració, un disseny fàcil d’entendre i un disseny de transmissió senzill i econòmic. Aquí teniu una pregunta, quins són els inconvenients del motor de corrent continu?
Crèdits fotogràfics:
- Motors de corrent continu sense escombretes news.softpedia
- 4 Funcionament quadrant del motor de CC per lh5.ggpht
- Motor de corrent continu engranat per wikimedia
- Motor de derivació zona










{kind=link}
{kind=link}
{kind=link}
{kind=link}