La primera avaluació reeixida de la teoria del control PID es va comprovar pràcticament en el camp dels sistemes de direcció automàtica per a vaixells, cap a l'any 1920. Després d'això, es va aplicar en diversos controls de processos automàtics industrials que requereixen especificacions de producció de fabricació optimitzades i precises. Per a les unitats de fabricació, el PID es va implementar popularment per aconseguir un control pneumàtic precís i, finalment, la teoria del PID es va aplicar als controladors electrònics en l'època moderna.
Què és el controlador PID
El terme PID és l’acrònim de controlador de derivada integral proporcional, que és un mecanisme de bucle de retroalimentació, dissenyat per controlar amb precisió diverses maquinàries de control industrial i moltes altres aplicacions similars que requereixen controls de modulació crítics i automatitzats.
Per implementar-ho, un controlador PID controla contínuament el funcionament del sistema i calcula l'element d'error induït. A continuació, avalua aquest valor d'error instantani en forma de diferència entre el punt de consigna (SP) requerit i la variable de procés mesurada (PV).
En referència a l’anterior, s’executa una correcció de retroalimentació instantània i automàtica en termes d’expressions proporcionals (P), integrals (I) i derivades (D), i d’aquí el nom de controlador PID.
En paraules simples, un controlador PID controla contínuament el funcionament d'un sistema de màquina determinat i continua corregint la seva resposta de sortida en funció de les variacions causades per influències externes, mitjançant un algorisme especificat. D'aquesta manera, garanteix que la màquina funcioni sempre dins de les condicions ideals estipulades.
Comprensió del diagrama de blocs PID
Un controlador PID es considera un sistema de control versàtil a causa de la seva capacitat per detectar i gestionar 3 paràmetres de control: proporcional, integral i derivat, i aplicar el control òptim previst a la sortida amb una precisió extrema, en referència a aquests 3 paràmetres.
La imatge següent mostra el diagrama de blocs del PID. Podem entendre ràpidament el principi bàsic de funcionament d’un PID fent referència a aquest diagrama de blocs.

imatge cortesia: en.wikipedia.org/wiki/File:PID_en.svg
Aquí podem veure un conjunt de variables com e (t) corresponent al valor d'error, r (t) corresponent al punt de referència objectiu i y (t) com a variable de procés mesurada. El controlador PID al llarg del seu funcionament controla el valor d’error e (t) avaluant la diferència entre el punt de referència previst r (t) o SP i el valor de procés mesurat y (t) o PV i, en conseqüència, executa una correcció de retroalimentació o optimització mitjançant els paràmetres a saber: proporcional, integral i derivada.
El controlador continua fent un esforç per reduir l’efecte d’error tot ajustant la variable de control u (t) a valors nous en funció de la suma ponderada analitzada dels termes de control (p, I, d).
Per exemple, en el funcionament d'un control de vàlvules, l'obertura i el tancament poden variar contínuament mitjançant un PID mitjançant avaluacions complexes, tal com s'ha explicat anteriorment.
Al sistema que es mostra es poden entendre els diversos termes tal com s’explica a continuació:
P- Controlador:
El terme P és proporcional als valors d 'error instantanis e (t) adquirits avaluant el resultat de SP - PV. En el cas que el valor d'error tendeixi a ser gran, la sortida de control també es fa proporcionalment més gran en referència al factor de guany 'K'. Tanmateix, en un procés que requereix compensació, com ara el control de temperatura, el control proporcional solitari pot provocar inexactituds en el punt de consigna i el valor real del procés, ja que no pot funcionar satisfactòriament sense una retroalimentació d'errors per generar la resposta proporcional. Implica que sense una retroalimentació d'errors, és possible que no sigui possible una resposta correctiva adequada.
I- Controlador:
El terme I es fa responsable dels valors avaluats prèviament dels errors SP-PV i els integra durant el seu període operatiu per crear el terme I. Per exemple, mentre s’aplica el control proporcional si el SP-PV produeix algun error, el paràmetre I s'activa i intenta acabar aquest error residual. En realitat, això passa amb una resposta de control activada a causa del valor acumulatiu de l'error registrat anteriorment. Tan aviat com passi això, el terme I deixa de millorar encara més. Això fa que l'efecte proporcional es minimitzi corresponentment a mesura que el factor d'error disminueixi, tot i que també es compensa a mesura que es desenvolupa l'efecte integral.
D- Controlador:
El terme D és l'aproximació més adequada deduïda per a les tendències evolutives de l'error SP - PV, en funció de la taxa de canvi instantània del factor d'error. Si aquest ritme de canvi augmenta ràpidament, el control de retroalimentació s’aplica de manera més agressiva i viceversa.
Què és la sintonització PID
Els paràmetres comentats anteriorment poden requerir un equilibri correcte per garantir una funció de control òptima, i això s'aconsegueix mitjançant un procés anomenat 'sintonització de bucle'. Les constants d’ajust implicades es denoten com a “K” tal com es mostra a les deduccions següents. Cadascuna d’aquestes constants s’ha de derivar individualment per a una aplicació seleccionada, ja que les constants depenen estrictament i varien segons les característiques i influències dels paràmetres externs específics implicats al bucle. Aquests poden incloure la resposta dels sensors emprats per mesurar un paràmetre determinat, l’element d’estrangulació final com una vàlvula de control, un possible temps transcorregut en el senyal del bucle i el propi procés, etc.
Pot ser acceptable emprar valors aproximats per a les constants a l’inici de la implementació segons el tipus d’aplicació, però, en última instància, això pot requerir una certa posada a punt i ajustaments precisos mitjançant l’experimentació pràctica, forçant canvis en els punts fixats i observant posteriorment la resposta de la control del sistema.
Tant si es tracta d'un model matemàtic com d'un bucle pràctic, es poden veure tots dos emprant una acció de control 'directa' per als termes especificats. És a dir, quan es detecta un augment d’un error positiu, s’inicia un control positiu augmentat corresponentment per controlar la situació dels termes implicats resumits.
Tanmateix, pot ser que calgui invertir-lo en aplicacions on el paràmetre de sortida pot tenir una característica configurada de manera oposada que requereixi una mesura de correcció inversa. Considerem l’exemple d’un bucle de flux en què s’especifica que el procés d’obertura de la vàlvula funciona amb una sortida del 100% i del 0%, però s’ha de controlar amb una sortida del 0% i del 100% corresponent, en aquest cas es fa imprescindible un control corrector invers. Per ser més precisos, tingueu en compte un sistema de refrigeració per aigua que tingui una característica de protecció en què la vàlvula estigui oberta al 100% durant la pèrdua de senyal. En aquest cas, la sortida del controlador ha de ser capaç de canviar al 0% de control en absència de senyal, de manera que la vàlvula pugui obrir-se al 100%, això es denomina control d'actuació inversa.
Model matemàtic de la funció de control

En aquest model matemàtic, totes les constants no negatives Kp, Ki i Kd signifiquen coeficients per als termes proporcionals, integrals i derivats respectivament (en algunes ocasions també es denoten P, I i D).
Personalització dels termes de control PID
A partir de les discussions anteriors, vam entendre que el sistema de control PID fonamentalment funciona amb tres paràmetres de control, però algunes aplicacions més petites poden preferir utilitzar un parell d’aquests termes o fins i tot un terme únic dels tres termes.
La personalització es fa convertint el terme no utilitzat en un paràmetre zero i incorporant el parell de termes PI, PD o termes individuals com P o I. Entre aquests, la configuració del controlador PI és més comuna ja que el terme D sol ser propens al soroll. influeix i, per tant, s’elimina en la majoria dels casos, tret que sigui estrictament obligatori. Normalment s’inclou el terme I, ja que garanteix que el sistema aconsegueixi el valor objectiu òptim previst a la sortida.
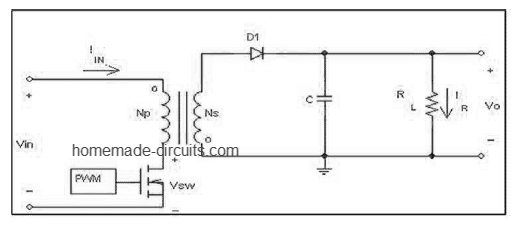
Anterior: Com dissenyar un convertidor Flyback: tutorial complet Següent: estabilitzador automàtic de tensió de 5 KVA a 10 KVA: 220 volts, 120 volts