A servomotor actua com un actuador rotatiu que s'utilitza principalment per canviar l'entrada elèctrica en acceleració mecànica. Aquest motor funciona basat en un servomecanisme sempre que s'utilitzi la retroalimentació de posició per controlar la velocitat i la ubicació final del motor. Els servomotors giren i obtenen un angle determinat en funció de l'entrada aplicada. Els servomotors són de mida petita però són molt eficients energèticament. Aquests motors es classifiquen en dos tipus, com el servomotor de CA i el servomotor de CC, però la principal diferència entre aquests dos motors és la font d'energia utilitzada. L'actuació d'a Servomotor de corrent continu depèn principalment només de la tensió, mentre que un servomotor de CA depèn tant de la tensió com de la freqüència. Aquest article tracta sobre un dels tipus de servomotors: un Servomotor de CA - Treballar amb aplicacions.
Què és un servomotor de CA?
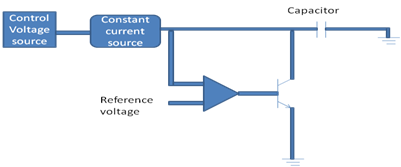
Un tipus de servomotor que genera sortida mecànica mitjançant l'ús d'una entrada elèctrica de CA en la forma de velocitat angular precisa s'anomena servomotor de CA. La potència de sortida obtinguda d'aquest servomotor oscil·la principalment entre watts i uns 100 watts. La freqüència de funcionament del servomotor de CA oscil·la entre 50 i 400 Hz. A continuació es mostra el diagrama del servomotor de CA.

Les principals característiques dels servomotors de CA inclouen principalment; es tracta de dispositius de menys pes, que proporcionen estabilitat i fiabilitat en l'operació, no es genera soroll durant el funcionament, proporciona característiques lineals de parell-velocitat i redueixen els costos de manteniment quan no hi ha anells i raspalls.
Si us plau, consulteu aquest enllaç per saber-ne més Tipus de servomotors de CA
Construcció de servomotors de CA
En general, un servomotor de CA és un motor d'inducció bifàsic. Aquest motor es construeix utilitzant un estator i un rotor com un motor d'inducció normal. En general, l'estator d'aquest servomotor té una estructura laminada. Aquest estator inclou dos bobinatges que es col·loquen a 90 graus de distància a l'espai. A causa d'aquesta variació de fase, es genera un camp magnètic rotatori.

El primer bobinatge es coneix com a bobinatge principal o també conegut com a bobinatge de fase fixa o de referència. Aquí, el bobinatge principal s'activa des de la font d'alimentació de tensió constant, mentre que l'altre bobinat com el bobinat de control o la fase de control s'activa per la tensió de control variable. Aquesta tensió de control es subministra simplement des d'un servoamplificador.

En general, el rotor està disponible en dos tipus de gàbia d'esquirol i tipus de copa d'arrossegament. El rotor utilitzat en aquest motor és un rotor de gàbia normal que inclou barres d'alumini fixades en ranures i curtcircuitades a través dels anells extrems. L'entrefer es manté al mínim per a la màxima connexió de flux. L'altre tipus de rotor com una copa d'arrossegament s'utilitza principalment quan la inèrcia del sistema giratori es torna baixa. Per tant, això ajuda a reduir el consum d'energia.
Principi de funcionament del servomotor de CA
El principi de funcionament del servomotor de CA és; en primer lloc, es dóna una tensió de CA constant al bobinatge principal de l'arrencada del servomotor i un altre terminal de l'estator es connecta simplement al transformador de control al llarg del bobinatge de control. A causa de la tensió de referència aplicada, l'eix del generador síncron girarà a una velocitat específica i obtindrà una determinada posició angular.

A més, l'eix del transformador de control té una posició angular específica que es compara amb el punt angular de l'eix del generador de sincronització. Així, la comparació de dues posicions angulars proporcionarà el senyal d'error. Més particularment, s'avaluen els nivells de tensió per a les posicions de l'eix equivalents que produeixen el senyal d'error. Així, aquest senyal d'error es comunica amb el nivell de tensió actual al transformador de control. Després d'això, aquest senyal es dóna al servoamplificador perquè generi una tensió de control desigual.
Amb aquesta tensió aplicada, de nou el rotor aconsegueix una velocitat específica, comença la revolució i es manté fins que el valor del senyal d'error arriba a zero, per tal d'aconseguir la posició preferida del motor dins dels servomotors de CA.
Funció de transferència del servomotor de CA
La funció de transferència del servomotor de CA es pot definir com la relació entre la LT (Transformada de Laplace) de la variable de sortida i la LT (Transformada de Laplace) de la variable d'entrada. Per tant, és el model matemàtic el que expressa l'equació diferencial que indica l'o/p a i/p del sistema.
Si el T.F. (funció de transferència) de qualsevol sistema, llavors la resposta de sortida es pot calcular per a diferents tipus d'entrada per reconèixer la naturalesa del sistema. De la mateixa manera, si no es coneix la funció de transferència (T.F), es pot trobar experimentalment simplement aplicant entrades conegudes al dispositiu i estudiant la sortida del sistema.
El servomotor de CA és un motor d'inducció bifàsic, el que significa que té dos bobinatges com el bobinat de control (bobinat de camp principal) i el bobinatge de referència (bobinat estimulant).

Per tant, hem d'esbrinar la funció de transferència del servomotor de ca, és a dir, θ(s)/ec(s). Aquí 'θ(s)/' és la sortida del sistema mentre que l'ex(s) és l'entrada del sistema.
Per esbrinar la funció de transferència del motor, hem d'esbrinar quin és el parell desenvolupat pel motor 'Tm' i el parell desenvolupat per la càrrega 'Tl'. Si igualem la condició d'equilibri com
Tm = Tl, llavors podem obtenir la funció de transferència.
Sigui, Tm = parell desenvolupat pel motor.
Tl = parell desenvolupat per la càrrega o parell de càrrega.
‘θ’ = desplaçament angular.
'ω' = d θ/dt = velocitat angular.
‘J’ = moment d’inèrcia de la càrrega.
'B' és el tauler de la càrrega.
Aquí les dues constants que cal tenir en compte són K1 i K2.
'K1' és el pendent de la tensió de la fase de control en funció de les característiques del parell.
'K2' és el pendent de les característiques del parell de velocitat.
Aquí, el parell desenvolupat pel motor es denota simplement per
Tm = K1ec- K2 dθ/dt —–(1)
El parell de càrrega (TL) es pot modelar considerant l'equació d'equilibri de parell.
Parell aplicat = parell oposat a causa de J,B
Tl = TJ + TB = J d^2θ/dt^2 + B dθ/dt^2 + B —–(2)
Sabem que la condició d'equilibri Tm = Tl.
K1ec- K2 dθ/dt = J d^2θ/dt^2 + B dθ/dt^2 + B
Apliqueu l'equació de transformada de Laplace a l'equació anterior
K1Ec(s) – K2 S θ(S) = J S^2θ (S) + B S θ(S)
K1Ec(s) = JS^2θ (S) + BSθ(S)+ K2S θ(S)
K1Ec(s) = θ (S)[J S^2 + BS + K2S]
T.F = θ (S)Ec(s) = K1/ J S^2 + BS + K2S
= K1/ S [B + JS + K2]
= K1/ S [B + K2 + JS]
= K1/ S (B + K2) [1 + (J/ B + K2) *S]
T.F = θ (S)Ec(s) = K1/(B + K2) / S[1 + (J/ B + K2) *S]
T.F = Km / S[1 + (J/ B + K2) *S] => Km / S(1 + STm)] = θ (S)Ec(s)
T.F = Km / S(1 + STm)] = θ (S)Ec(s)
On, Km = K1/ B + K2 = constant guany del motor.
Tm = J/ B + K2 = constant de temps del motor.
Mètodes de control de velocitat del servomotor de CA
Generalment, servo motors té tres mètodes de control com el control de posició, control de parell i control de velocitat.
El mètode de control de posició s'utilitza per determinar la mida de la velocitat de rotació a través dels senyals de freqüència d'entrada externa. L'angle de revolució ve determinat pel núm. de llegums. La posició i la velocitat d'un servomotor es poden assignar directament mitjançant la comunicació. Com que la posició del mètode pot tenir un control extremadament estricte sobre la posició i la velocitat, normalment s'utilitza a l'aplicació de posicionament.
En el mètode de control de parell, el parell de sortida del servomotor s'estableix mitjançant l'entrada analògica a l'adreça. Pot canviar el parell simplement canviant l'analògic en temps real. A més, també pot canviar el valor a l'adreça relativa mitjançant comunicació.
En el mode de control de velocitat, la velocitat del motor es pot controlar mitjançant entrada analògica i pols. Si hi ha requisits de precisió i no es preocupa per tant parell, el mode de velocitat és millor.
Característiques del servomotor de CA
Les característiques de la velocitat del parell d'un servomotor de CA es mostren a continuació. En les següents característiques, el parell està canviant amb la velocitat, però no linealment perquè depèn principalment de la relació de la reactància (X) a resistència (R). El valor baix d'aquesta relació implica que el motor té una alta resistència i una baixa reactància, en aquests casos, les característiques del motor són més lineals que l'alt valor de la relació entre la reactància (X) i la resistència (R).

Avantatges
Els avantatges dels servomotors de CA inclouen els següents.
- Les característiques de control de velocitat d'aquest motor són bones.
- Generen menys quantitat de calor.
- Ofereixen una alta eficiència, més parell per pes, fiabilitat i un soroll de RF reduït.
- Necessiten menys manteniment.
- Tenen una esperança de vida més llarga en la inexistència d'un commutador.
- Aquests motors són capaços de gestionar sobretensions de corrent més altes en maquinària industrial.
- A altes velocitats, ofereixen un parell més constant.
- Aquests són altament fiables.
- Ofereixen un rendiment d'alta velocitat.
- Són molt adequats per a aplicacions de càrrega inestables.
Els desavantatges dels servomotors de CA inclouen els següents.
- El control del servomotor de CA és més difícil.
- Aquests motors es poden trencar per sobrecàrrega constant.
- Les caixes de canvis són sovint necessàries per transmetre potència a altes velocitats.
Aplicacions
Les aplicacions dels servomotors de CA inclouen les següents.
- Els servomotors de CA s'apliquen quan la regulació de la posició és significativa i normalment es troben en dispositius semiconductors, robots, avions i màquines eina.
- Aquests motors s'utilitzen en els instruments que funcionen amb servomecanisme com en ordinadors i dispositius de control de posició.
- El servomotor de CA s'utilitza en màquines-eina, maquinària robòtica i sistemes de seguiment.
- Aquests servomotors s'utilitzen en diverses indústries per la seva eficiència i versatilitat.
- El servomotor de CA s'utilitza en màquines i aparells més comuns com escalfadors d'aigua, forns, bombes, vehicles tot terreny, equips de jardins, etc.
- Molts dels aparells i eines que s'utilitzen cada dia a la casa són impulsats per servomotors de CA.
Per tant, aquesta és una visió general d'ac servomotors - treballant amb aplicacions. Aquests motors s'utilitzen en moltes aplicacions, com ara instruments que funcionen amb servomecanisme i també màquines-eina, sistemes de seguiment i robòtica. Aquí teniu una pregunta per a vosaltres, què és un motor d'inducció?