
Servo implica un control de retroalimentació de detecció d'errors que s'utilitza per corregir el rendiment d'un sistema. També requereix un controlador generalment sofisticat, sovint un mòdul dedicat dissenyat especialment per al seu ús amb servomotors. Els servomotors són motors de corrent continu que permeten un control precís de la posició angular. Són motors de corrent continu la velocitat dels quals es redueix lentament pels engranatges. Els servomotors solen tenir una revolució tallada de 90 ° a 180 °. Alguns servomotors també tenen un límit de revolució de 360 ° o més. Però els servomotors no giren constantment. La seva rotació està limitada entre els angles fixos.
El servomotor és un conjunt de quatre coses: un motor de corrent continu normal, una unitat de reducció d’engranatges, un dispositiu de detecció de posició i un circuit de control. El motor de corrent continu està connectat amb un mecanisme d'engranatges que proporciona retroalimentació a un sensor de posició que és majoritàriament un potenciòmetre. Des de la caixa de canvis, la sortida del motor es lliura mitjançant servo spline al braç servo. Per als servomotors estàndard, l’engranatge està format normalment per plàstic, mentre que per als servos d’alta potència l’engranatge està format per metall.
Un servomotor consta de tres cables: un cable negre connectat a terra, un cable blanc / groc connectat a la unitat de control i un cable vermell connectat a la font d'alimentació.
La funció del servomotor és rebre un senyal de control que representa la posició de sortida desitjada del servoeix i aplicar energia al motor de corrent continu fins que el seu eix giri a aquesta posició.
Utilitza el dispositiu de detecció de posició per esbrinar la posició de rotació de l’eix, de manera que sap en quina direcció ha de girar el motor per moure l’eix a la posició indicada. L’eix no sol girar lliurement al voltant d’un motor de corrent continu, però pot girar 200 graus.

servo Motor
Des de la posició del rotor, es crea un camp magnètic giratori per generar eficientment un toc. El corrent flueix al bobinatge per crear un camp magnètic giratori. L'eix transmet la potència de sortida del motor. La càrrega es condueix a través del mecanisme de transferència. La terra rara o un altre imant permanent d’alta funció es col·loca externament a l’eix. El codificador òptic sempre observa el nombre de rotacions i la posició de l’eix.
Funcionament d'un servomotor
El servomotor consisteix en un motor de corrent continu, un sistema d'engranatges, un sensor de posició i un circuit de control. Els motors de corrent continu s’alimenten des d’una bateria i funcionen a gran velocitat i parell baix . El conjunt d'engranatges i eixos connectats als motors de corrent continu redueixen aquesta velocitat fins a obtenir una velocitat suficient i un parell superior. El sensor de posició detecta la posició de l’eix des de la seva posició definida i alimenta la informació al circuit de control. En conseqüència, el circuit de control descodifica els senyals del sensor de posició i compara la posició real dels motors amb la posició desitjada i, en conseqüència, controla la direcció de rotació del motor de corrent continu per obtenir la posició requerida. El servo motor sol requerir un subministrament de CC de 4,8 V a 6 V.
Control d’un servomotor
Un servomotor es controla controlant la seva posició mitjançant la tècnica de modulació d’amplada de pols. L’amplada del pols aplicat al motor varia i s’envia durant un temps fix.
L'amplada del pols determina la posició angular del servomotor. Per exemple, una amplada d'impuls d'1 ms provoca una posició angular de 0 graus, mentre que una amplada d'impuls de 2 ms provoca una amplada angular de 180 graus.
Avantatges:
- Si es col·loca una càrrega pesada al motor, el conductor augmentarà el corrent a la bobina del motor mentre intenta girar el motor. No hi ha cap condició fora de pas.
- És possible un funcionament a gran velocitat.
Desavantatges:
- Atès que el servomotor intenta girar segons els impulsos de comandament, però es retarda, no és adequat per al control de rotació de precisió.
- Major cost.
- Quan s’atura, el rotor del motor continua movent-se cap endavant i cap endavant, de manera que no és adequat si cal evitar vibracions
7 Aplicacions dels servomotors
Els servomotors s’utilitzen en aplicacions que requereixen ràpides variacions de velocitat sense que el motor s’escalfi massa.
- A les indústries s’utilitzen en màquines-eina, envasos, automatització de fàbriques, manipulació de materials, conversió d’impressions, línies de muntatge i moltes altres aplicacions exigents robòtica, maquinària CNC o fabricació automatitzada.
- També s’utilitzen en avions radiocontrolats per controlar el posicionament i el moviment dels ascensors.
- S’utilitzen en robots a causa del seu encès i apagat suaus i del seu posicionament precís.
- També són utilitzats per la indústria aeroespacial per mantenir el fluid hidràulic en els seus sistemes hidràulics.
- S’utilitzen en moltes joguines radiocontrolades.
- S’utilitzen en dispositius electrònics com ara reproductors de DVD o Blue-ray Disc per ampliar o reproduir les safates del disc.
- També s’utilitzen en automòbils per mantenir la velocitat dels vehicles.
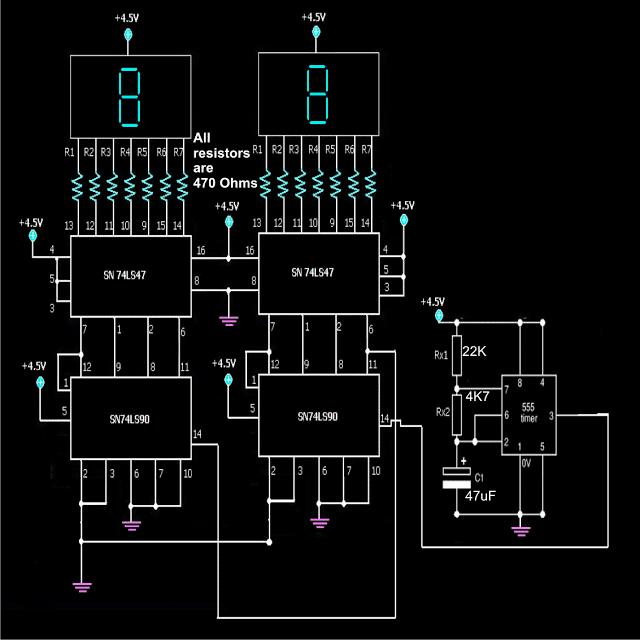
Circuit d'aplicació del servomotor
Del circuit d'aplicació següent: cada motor té tres entrades: VCC, terra i un senyal d'ona quadrada periòdica. L’amplada de pols de l’ona quadrada determina la velocitat i la direcció dels servomotors. En el nostre cas, només hem de canviar la direcció per permetre que el dispositiu avanci, retrocedeixi i giri a l’esquerra i a la dreta. Si l'amplada del pols és inferior a un període de temps determinat, el motor circularà en sentit horari. Si l'amplada del pols supera aquest període de temps, el motor circularà en sentit antihorari. El marc de temps mitjà es pot ajustar mitjançant un potenciòmetre incorporat a l'interior del motor.

3 diferències entre motor pas a pas i motor servo:
- Els motors pas a pas tenen un gran nombre de pols, parells magnètics generats per un imant permanent o un corrent elèctric. Els servomotors tenen molt pocs pols, cada pol ofereix un punt d’aturada natural per a l’eix del motor.
- El parell d’un motor pas a pas a velocitats baixes és superior al d’un servomotor de la mateixa mida.
- El funcionament del motor pas a pas es sincronitza mitjançant la sortida de senyals de pols d’ordre des del generador de polsos. En canvi, el funcionament del servomotor es queda per darrere dels impulsos de comandament.
Ara teniu una idea sobre el funcionament del servòmetre si teniu cap pregunta sobre aquest tema o sobre els projectes d’electricitat i electrònica, deixeu els comentaris a continuació.
Crèdit fotogràfic
- Servomotor per Wikimedia



![Circuits de carregador de bateria de 12 V [amb transistors LM317, LM338, L200]](https://electronics.jf-parede.pt/img/battery-chargers/11/12v-battery-charger-circuits-using-lm317.png)


{kind=link}