El protocol de transport de sol·licitud de servei o SRTP va ser desenvolupat per 'GE Intelligent Platforms', abans conegut com GE Fanuc, utilitzat per a la comunicació amb controladors lògics programables . Els dispositius comuns que s'utilitzen en diferents indústries com l'aeronàutica, la gestió de l'aigua, la fabricació i els viatges són dispositius lògics programables que es coneixen com a PLC. Aquest article tracta una visió general d'un SRTP o protocol de transport de sol·licitud de servei - Treballar amb l'aplicació s .
Què és el protocol de transport de sol·licitud de servei?
El protocol que s'utilitza per transferir les dades dels PLC (controladors lògics programables) es coneix com a protocol de transport de sol·licitud de servei. Aquest protocol s'utilitza simplement a través d'Ethernet i admet gairebé tots els equips d'automatització de GE un cop equipats mitjançant un Ethernet port. Aquest port Ethernet admet GE SRTP, que és un successor dels protocols sèrie com SNP i SNPX per a mitjans Ethernet. Qualsevol client d'SRTP és capaç de llegir i escriure la memòria del sistema per a qualsevol dispositiu remot de SRTP.
Com funciona SRTP?
El protocol del controlador GE-SRTP funciona transferint les dades cap i des del dispositiu a Ethernet permetent el FieldServer a través del controlador GE-SRTP. Gairebé tots automatització L'equip de GE simplement admet aquest protocol un cop equipat amb un port Ethernet.
El FieldServer pot seguir un client o un servidor. El conductor actua com un client capaç de llegir i escriure la memòria del sistema per a qualsevol no. dels dispositius SRTP remots. Una vegada que el FieldServer actua com un client, pot escalar les dades de les paraules.
Un cop disposat el FieldServer per funcionar com a servidor SRTP, el controlador permet escriure missatges del sistema a la memòria del sistema i respon a les sol·licituds de lectura. El controlador no pot seguir un client i un servidor alhora en una connexió similar a una adreça IP similar.
El conductor és capaç de representar la seva informació de comunicació perquè es pugui observar a través d'un dispositiu aigües avall. A les matrius de dades de FieldServer, es representen les estadístiques i els diagnòstics del controlador perquè es puguin llegir i controlar mitjançant dispositius o sistemes remots.
Flux de senyal de l'HMI al PLC mitjançant el protocol SRTP
Un PLC inclou diversos registres on aquests registres es programen i s'accedeix a través d'una HMI (interfície home-màquina). En general, una HMI és un dispositiu de programari que s'executa en un ordinador. A continuació es mostra el diagrama de flux del senyal de l'HMI al PLC mitjançant SRTP.
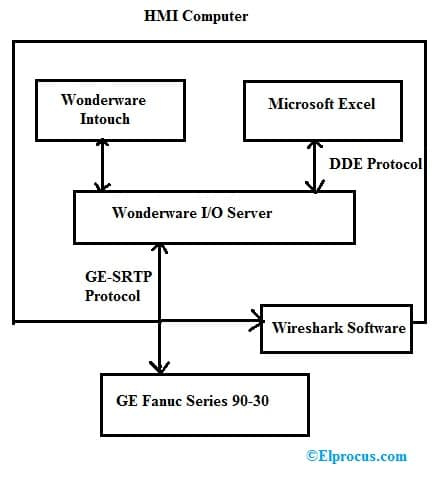
L'ordinador HMI funciona amb Windows XP que és operat pels operadors del sistema per comunicar-se a través del PLC. Aquí, es va crear una màquina humana simulada amb Wonderware Intouch v9.5. Per tant, la comunicació entre la sèrie GE Fanuc 90-30 i l'espai de treball necessita un servidor Wonderware IO que pot incloure diverses fonts d'entrada. En això, hem utilitzat el programari Wonderware Intouch, Microsoft Excel i el protocol Dynamic Data Exchange. El protocol GE-SRTP s'utilitza entre el servidor Wonderware IO i el GE Fanuc Series 90-30) per transportar les dades.
Diferència B/N SRTP vs RTP
El diferència entre SRTP i RTP inclou el següent.
| SRTP |
RTP |
| El terme SRTP significa 'protocol de transport de sol·licitud de servei'. | RTP significa 'Protocol de transport en temps real'. |
| SRTP s'utilitza per transferir dades des de PLC mitjançant Ethernet. | RTP s'utilitza per transmetre diferents mitjans en temps real com àudio o vídeo d'un punt final a un altre. |
| És aplicable a gairebé tots els equips d'automatització de GE . | És aplicable a les tecnologies de transmissió de vídeo, Skype i conferències. |
Tipus de dades i funcions compatibles
Els tipus de dades i les funcions que admet SMBus inclouen els següents.
- %R – Registre la memòria.
- %AI - Memòria d'entrada analògica.
- %AQ – Memòria de sortida analògica.
- %I – Memòria d'entrada discreta.
- %Q – Memòria de sortida discreta.
- %T – Memòria temporal discreta.
- %M – Memòria momentània discreta.
- %SA: grup de memòria del sistema discret A.
- %SB: grup de memòria del sistema discret B.
- %SC: grup de memòria del sistema discret C.
- %S – Memòria discreta del sistema.
- %G – Taula de dades globals discretes.
De la mateixa manera, les funcions i els tipus de dades no compatibles són missatges de programació. Un dispositiu de transferència de dades com FieldServer no requereix missatges de programació.
Avantatges i inconvenients
El avantatges del protocol de transport de sol·licitud de servei incloure el següent.
- Alta qualitat.
- És molt senzill d'implementar i d'utilitzar.
- És fiable i té una latència baixa.
- Codi obert.
- Interoperable i agnòstic de contingut.
- Molt protegit.
El inconvenients del protocol de transport de sol·licitud de servei Inclou el següent.
- Necessita més memòria i esforç de programació.
- La seva latència és alta a causa de la seva naturalesa orientada a la connexió.
Aplicacions del protocol de transport de sol·licituds de servei
El aplicacions del protocol de transport de sol·licitud de servei incloure el següent.
- El protocol de transport de sol·licitud de servei s'utilitza per transferir dades des de PLC (controladors lògics programables).
Aquest tipus de protocol s'utilitza a través d'Ethernet i tots els equips d'automatització de GE admeten aquests protocols un cop equipats mitjançant un port Ethernet. - Aquest protocol simplement l'utilitzen diversos controladors connectats a Ethernet.
Així, això és una visió general d'un protocol de transport de sol·licitud de servei o SRTP. El protocol SRTP es va provar amb el Fanuc Robot R-30iB per llegir i escriure diferents valors de tipus de memòria i tant la lectura com l'escriptura de valors de text van funcionar. Aquí teniu una pregunta per a vosaltres, què és HTTP?