A la publicació s’explica un controlador de motor de corrent continu que compta amb una compensació de parell constant per permetre que el motor funcioni a una velocitat constant independentment de la càrrega.
Inconvenient dels controladors de velocitat ordinaris
Un inconvenient de la majoria de controladors de velocitat simples només proporcionen al motor una tensió constant predeterminada. Com a resultat, la velocitat no es manté constant i varia amb la càrrega del motor, a causa de l'absència de compensació del parell.
Per exemple, en un model de tren, amb controladors simples, la velocitat del tren disminueix gradualment per als desnivells d'escalada i s'accelera mentre es fa baixada.
Per tant, per als models de trens, l’ajust del control del pot per mantenir una velocitat del motor seleccionada també es desvia en funció de la càrrega que pugui tirar el motor.
El circuit de control de velocitat del motor de parell constant que s’explica en aquest article elimina aquest problema rastrejant la velocitat del motor i mantenint-la constant durant un paràmetre de control predeterminat, independentment de la càrrega que pugui tenir el motor.
El circuit es pot aplicar a la majoria de models que utilitzen un motor d’imant permanent de CC.
Càlcul del factor CEM posterior
La tensió a través dels terminals del motor comprèn un parell de factors, la e.m.f posterior. produït pel motor, i la tensió va caure a través de la resistència de l'armadura.
La part posterior e.m.f. generat pel bobinatge del motor és normalment proporcional a la velocitat del motor, la qual cosa significa que es pot controlar la velocitat del motor mesurant aquest contingut emf posterior. Però, el problema principal és aïllar i detectar l’emf posterior. a partir de la tensió de resistència de la armadura.
Suposant que una resistència independent s’uneixi en sèrie amb el motor, tenint en compte que un corrent únic comú passa per aquesta resistència i també per la resistència de la indústria, la caiguda de tensió a través de les dues resistències de la sèrie podria ser equivalent a la caiguda de la resistència de la indústria.
En realitat, es pot suposar que quan aquests dos valors de resistència són idèntics, les dues magnituds de voltatge de cadascuna de les resistències també seran similars. Amb aquestes dades, és possible deduir la caiguda de tensió de R3 de la tensió del motor i obtenir el valor e.m.f posterior necessari per al processament.

S'està processant CEM posterior per par constant
El circuit proposat monitoritza contínuament l’e.m.f posterior. i, en conseqüència, regula el corrent del motor per assegurar-se que, per a una configuració de control de pot assignada, la e.m.f. posterior, juntament amb la velocitat del motor, es mantingui a un parell constant.
Per fer més fàcil la descripció del circuit, es considera que P2 s’ajusta i es manté a la seva posició central, i que la resistència R3 es selecciona com a equivalent al valor de resistència de la indústria del motor.
Càlcul de la tensió del motor
La tensió del motor es pot calcular afegint la e.m.f posterior. Va amb la tensió caiguda a través de la resistència interna del motor Vr.
Tenint en compte que R3 baixa una tensió Vr, la tensió de sortida Vo serà igual a Va + 2 V.
La tensió a l’entrada d’inversió (-) d’IC1 serà Va + Vr, i la de l’entrada no inversora (+) serà Vi + (Va + 2Vr - Vi) / 2
Com que les dues magnituds de tensió anteriors se suposa que són iguals, organitzem l'equació anterior com:
Va + Vr = Vaig veure + (Va + 2Vr - Vaig veure) / 2
Simplificant aquesta equació es proporciona Va = Vi.
L’equació anterior indica que l’e.m.f posterior. del motor es manté constantment al mateix nivell que la tensió de control. Això permet que el motor funcioni amb una velocitat i un parell constant per a qualsevol configuració especificada de l’ajust de velocitat P1.
S'inclou P2 per compensar el nivell de diferència que pot existir entre la resistència R3 i la resistència de l'armadura. S'executa ajustant la magnitud de la retroalimentació positiva a l'ampli operatiu d'entrada no inversor.
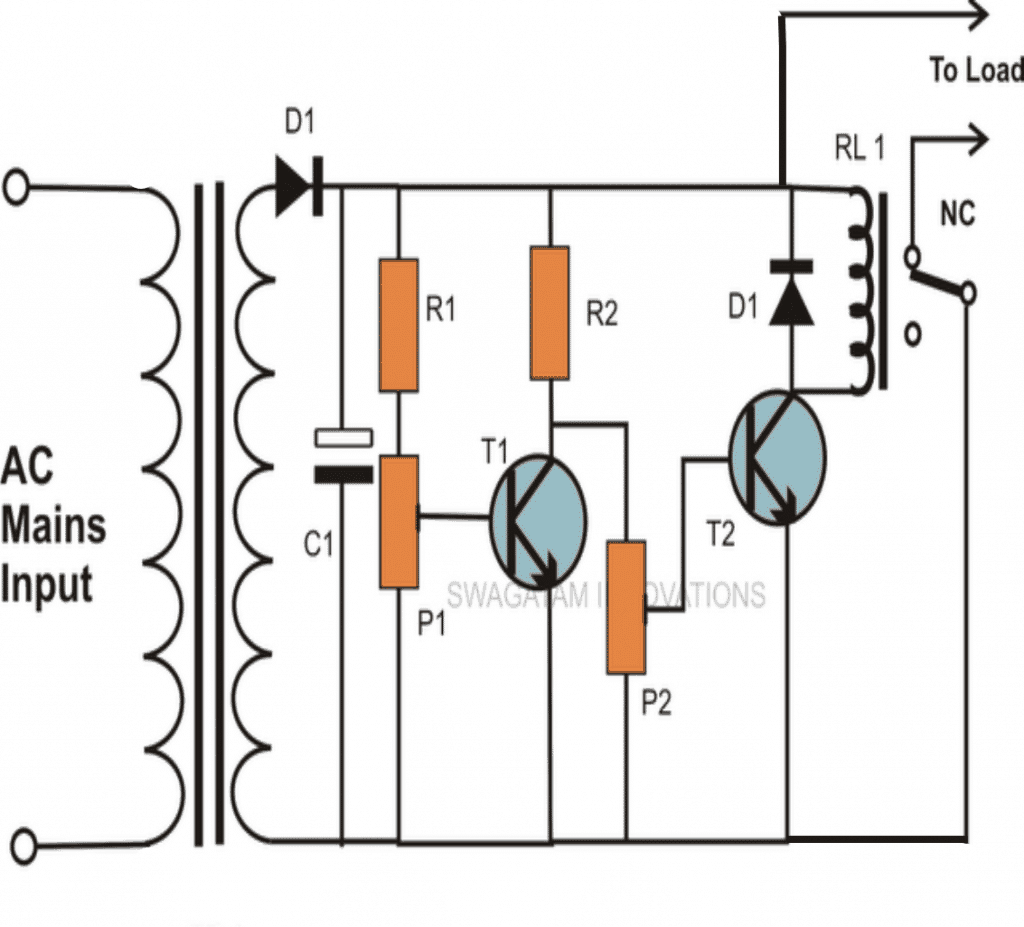
L’amplificador operatiu LM3140 compara bàsicament el voltatge desenvolupat a través de la indústria del motor amb l’equivalent posterior de la cem a través del motor i regula el potencial base del T1 2N3055.
S'està configurant T1 com a seguidor de l'emissor regula la velocitat del motor d’acord amb el seu potencial base. Augmenta el voltatge a través del motor quan es detecta un emf posterior més alt per l'amplificador operatiu, el que resulta en un augment de la velocitat del motor i viceversa.
El T1 s’ha de muntar sobre un dissipador de calor adequat per al bon funcionament.
Com configurar el circuit
La configuració del circuit de control de velocitat del motor de parell constant es fa ajustant P2 amb el motor amb càrrega variable fins que el motor aconsegueix un parell constant independentment de les condicions de càrrega.
Quan s’aplica el circuit per a models de trens, s’ha de tenir precaució de no girar massa P2 cap a P1, cosa que pot provocar que el tren model es desacceleri i, per contra, no s’ha de girar massa P2 en sentit contrari, cosa que la velocitat del tren cada cop és més ràpida mentre es puja per un desnivell de pujada.
Anterior: S'han explorat circuits simples de carregador de bateria Ni-Cd Següent: Mini circuit transceptor