El missatge explica un simple obstacle que evita el circuit del robot sense microcontrolador i sense utilitzar circuits especials de controlador de motor ni circuits integrats. La idea va ser sol·licitada pel senyor Faiyyaz
El disseny
Bàsicament té la forma d'un fitxer vehicle en moviment que és capaç de detectar i evitar possibles obstacles en el seu camí i canviar la seva direcció adequadament perquè el seu moviment es mantingui ininterromput, senzill.
L'operació és, per tant, automàtica sense cap intervenció manual o humana.
La idea presentada d’un robot que evita obstacles amb microcontrolador, tal com el seu nom indica, no utilitza cap microcontrolador i, per tant, és extremadament senzilla de construir i adequada per a qualsevol nou aficionat.
En dissenyar el circuit, em vaig adonar que, per implementar el principi, caldrien almenys un parell de mòduls de sensor d’obstacles, ja que l’ús d’un mòdul únic pot provocar moviments erràtics del motor i pot no ajudar a desviar o girar el vehicle sense problemes un camí lliure.
El motor del vehicle configurat és força similar al cotxe de joguina de control remot que havia comentat en una de les publicacions anteriors.
El diagrama següent representa un dels mòduls del sistema i, per tant, caldrien dos o un parell d’aquests mòduls a la banda dreta i esquerra del vehicle.
La idea és senzilla i funciona sense microcontrolador i sense circuits especials de controlador de motor especials. Això significa que podeu fer-ho sense cap tipus de codificació i sense utilitzar cap tipus de controlador de motor complex ..... i el circuit us permetrà utilitzar qualsevol motor de corrent continu independentment de la seva potència, de manera que fins i tot es podrien evitar vehicles fabricats amb aquest circuit que s’utilitzen normalment en centres comercials i punts de venda similars.
Esquema de connexions

Ara intentem entendre el circuit anterior amb l'ajut de la següent explicació:
Com funciona
L'IC 555 es configura com un transmissor IR i està configurat per generar una freqüència constant de 38 kHz, mentre que el circuit transistoritzat contigu es configura com l'etapa del receptor o l'etapa del sensor IR.
Suposem que és el mòdul lateral dret i suposem que aquest mòdul és el primer a detectar un obstacle al camí.
Per tant, tan bon punt es detecta un obstacle, la freqüència de 38 kHz generada pel 555 IC es reflecteix cap al sensor del circuit receptor adjunt.
El receptor activa instantàniament els transistors associats de manera que el transistor conductor final queda inhibit de la seva conducció.
Ara, el motor controlat per aquest transistor se suposa que es troba al costat esquerre del vehicle, és a dir, al costat oposat d’aquest mòdul ... de manera similar, el motor situat al costat dret és controlat pel mòdul esquerre. .
En conseqüència, quan s'activa el mòdul detector d'obstacles lateral dret suposat anteriorment, atura el motor del costat esquerre, mentre que el motor del costat dret es deixa moure amb normalitat.
Aquesta situació fa que el vehicle es vegi obligat a prendre una desviació cap a l’esquerra ... el que significa que ara el mòdul esquerre suposat comença a rebre senyals d’obstacles encara més forts i continua obligant el vehicle a continuar amb la desviació en curs fins que hagi evitat completament l’obstacle. . Ara el mòdul deixa de rebre els senyals d’obstacles i el vehicle comença a avançar amb normalitat pel seu nou camí.
Mentre es realitza la desviació anterior, el mòdul lateral esquerre es veu obligat a estar cada vegada més aïllat i allunyat de l’obstacle de manera que no tingui l’oportunitat d’interferir-se en el procediment i permetre una desviació neta i fluida del vehicle.
Exactament els mateixos procediments s’implementen en cas que el mòdul del costat esquerre detecti l’obstacle davant del mòdul del costat dret, en el qual el vehicle es veu obligat a moure’s cada cop amb més força cap al costat dret.
També podem veure una etapa de circuit 'inhabilitant' al mòdul que està interconnectada entre els mòduls lateral esquerre i dret. Aquesta etapa s'introdueix a propòsit per assegurar que els dos mòduls mai s'activen junts.
Per tant, per exemple, si el mòdul lateral esquerre es converteix en el primer a detectar un obstacle, desactiva immediatament el mòdul lateral dret i inicia la desviació del vehicle a la dreta i viceversa.
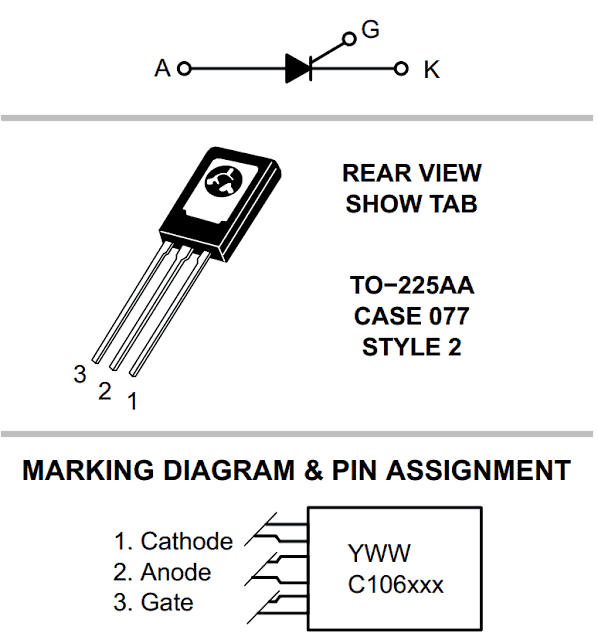
El sensor IC podria ser un sèrie TSOP17XX estàndard
Per obtenir més informació sobre l’IC del sensor anterior, podeu obtenir informació com connectar TSOP1738 IC
I el motor ha d’estar equipat amb caixes de canvis perquè el moviment es mantingui originalment a un nivell controlat.
Configuració de rodes
La configuració completa del mòdul esquerre i dret i les connexions elèctriques associades es poden veure a la figura següent:

Actualització
Una mica de pensament ens indica que el simple obstacle anterior que evita el circuit del robot també es podria implementar utilitzant un únic mòdul, en lloc dels dos.
Tanmateix, un únic mòdul permetria que el vehicle realitzés una desviació de cada cara cada vegada que detectés un obstacle, per tant, el sistema es podria configurar per fer una desviació en sentit horari o en sentit antihorari en funció del motor connectat amb el circuit per a les accions.
L'exemple configurat es pot visualitzar a la imatge següent:

Tot i això, sembla que hi ha un problema amb la configuració del motor únic anterior. Si suposem que el vehicle troba una cantonada en angle recte al costat esquerre. Això obligarà el vehicle a seguir movent-se en sentit antihorari, fins que faci un gir en U i comenci a retrocedir cap a la mateixa direcció des d’on havia començat. Això no agradaria a l'usuari.
Anterior: Resistències SMD: introducció i treball Següent: Com funciona un acceleròmetre