El missatge explica un circuit que controla un motor submergible de sondeig mitjançant els botons vermells (Inici) i verds (Stop), en resposta a les condicions baixes i altes de l’aigua, i també en un estat en què el motor pot experimentar una situació de funcionament sec. . La idea va ser sol·licitada pel senyor Vamsi.
Controlador d'arrencada / parada automàtic per al contactor Borewell
Hola senyor, sóc un aficionat a l'electrònica i un espectador habitual del vostre bloc, també és un gran fan de U senyor ... He après molt de vosaltres. i MOLTES GRÀCIES SENYOR ...
Senyor, em podeu suggerir, necessito el disseny del circuit d’un controlador de desbordament d’aigua totalment automàtic amb circuit de protecció de funcionament en sec amb indicadors de nivell.
El circuit necessari per a l'arrencada de sondeig com en general, tots els arrencadors de borewell tindran un botó de tipus VERD i un VERMELL. manualment engegarem el motor prement el VERD durant 1 segon. i 1seg. per apagar de la mateixa manera, el disseny que necessito és que el controlador funcioni amb relé dual (2 relés individuals), un és per iniciar el bobinat.
és a dir, el relé1 s’activa durant 1 segon. per engegar el motor i l’altre relé2 és PARAR el motor s’activa durant 1 segon. respectivament i el més important és que no podem deixar caure sensors tan llargs fins al nivell del sòl dels pous profunds
per tant, tot el que necessito és en el cas que, si hi ha menys aigua al pou de forat, el sensor del OHT estigui connectat a la canonada d’aigua superior que cau al dipòsit, els sensors haurien d’activar i activar el relé2 que al seu torn apagarà el motor si abocaments d'aigua molt baixos. l’aigua que surt de la canonada trigarà almenys 15 segons. per tant, es necessitarà un retard d’activació d’almenys 20 segons (el relé 1 s’activa i espereu la descàrrega d’aigua fins al temps esmentat).
Ara el motor hauria de funcionar en aquestes condicions:
1. quan el nivell baix d’aigua a OHT, el relé 1 s’energia durant 1 segon i engega el motor.
2 El relé2 s’ha d’activar en dues condicions: a) quan l’aigua plena de OHT s’activa durant 1 segon. apagant el motor, ib) quan s'executa el DRY RUN, el temps es retarda almenys durant 20 segons i activa el relé2 durant 1 segon per apagar el motor.
El circuit ha de funcionar a 12v dc. i també, si és possible, necessiteu un polsador RESET, quan l’aigua de l’OHT suposi una meitat del tanc, si hem d’omplir el dipòsit, el motor hauria d’arrencar prement el botó RESET.
Aquesta és la meva breu explicació. He intentat molt aquest disseny de circuits desitjat. però no sóc tan expert en dir-ho, però tinc coneixements tècnics, lògics i bàsics en aquest camp. espero que entengueu la meva sol·licitud. Si us plau, feu el necessari senyor, esperem que espereu una valuosa resposta. Per publicar el diagrama del circuit, el meu identificador: login2vamsi183@gmail.com
Gràcies i salutacions
Vamsi Krishna
El disseny
En un parell dels meus articles anteriors, vaig parlar sobre un circuit similar pel que fa a un circuit de controlador de bomba submergible semiautomàtica, però el disseny utilitzava un ordinari sondes metàl·liques amb detecció d'humitat per a la detecció i activació.
El disseny actual es basa en una operació de commutador de flotador basat en canya / imant, que no només facilita les operacions, sinó que també és molt fiable.
El circuit del controlador d’arrencada del motor sondeig submergible proposat es pot entendre fent referència al següent esquema:
Esquema de connexions

El diagrama anterior mostra una configuració molt senzilla que utilitza un parell d’etapes monoestables IC 555 idèntiques.
L’etapa IC2 forma el circuit d’arrencada de la bomba submergible, mentre que l’etapa IC2 està posicionada per aturar l’interruptor de la bomba.
Tots dos circuits funcionen amb commutadors reed ( interruptor flotant ) que es pot veure posicionat a l'interior del tanc superior, un a la part inferior i l'altre a la part superior del tanc.
La canya inferior es tanca quan el nivell de l'aigua és a prop del llindar inferior i és paral·lela al commutador de canya, mentre que la canya superior es tanca quan el nivell de l'aigua arriba al nivell on s'ha instal·lat.
Suposant que el nivell de l’aigua estigui a prop del commutador de canya inferior, el commutador de canya es tanca, provocant l’etapa IC1, que al seu torn fa clic momentàniament sobre el relé associat.
Quan el relé es connecta a través del botó d’INICI de la bomba submergible, el motor s’inicia i comença a bombejar aigua cap al tanc aeri.
El nivell de l’aigua a l’OHT ara comença a augmentar i, quan arriba a prop de la canya superior de l’interruptor de canya superior # 2, es tanca activant el relé IC2 per un moment activant l’interruptor STOP del motor. Ara el motor s’atura i interromp el bombament d’aigua a l’interior de l’OHT.
Protecció contra funcionament en sec del motor
Tal com es sol·licita, també cal senyalitzar el circuit STOP en cas que es detecti un funcionament en sec del motor.
En absència d’aigua per bombar, el motor pot estar sotmès a una situació de “funcionament en sec” que al seu torn podria escalfar el motor fins a nivells perillosos.
Així, es pot introduir un senzill sensor de calor per detectar la pujada de calor del motor de la bomba i assenyalar l’etapa IC1 de manera que el botó STOP s’activi instantàniament a temps i el motor s’estalvi de la crema.
A continuació es pot veure un circuit senzill però molt eficaç del sensor de calor. Assegura la protecció vital contra el funcionament en sec del motor de sondeig i també facilita l'acció exterior

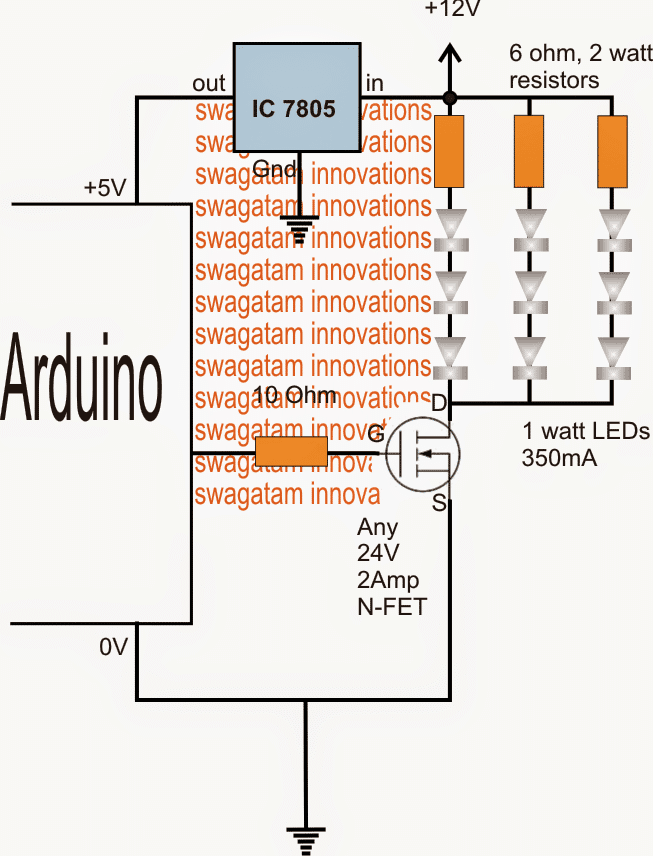
Utilitzant 3 opamps d’IC LM324
El circuit es configura al voltant de tres opamps (LM324 o tres CI 741 separats), on A2 forma el sensor de temperatura a través de D1.
El D1, que és un díode 1N4148, s’utilitza com a sensor de calor eficaç i se suposa que està enganxat al cos del motor per a la seva detecció.
P1 està configurat de manera que, quan el motor tendeix a escalfar-se, la sortida de A3 es converteix en prou alta com per provocar el transistor opto en conducció, per tant, en cas que un motor passi per una situació de funcionament en sec i comenci a escalfar-se, D1 detecta que això provoca acoblador opto (4n35).
Ara, ja que el col·lector de l’acoblador opto està connectat amb el pin número 2 d’IC2 (relé STOP), l’IC2 respon a això i inicia ràpidament el relé i atura el motor.
El motor es refreda gradualment, cosa que fa que l’acoblador opto també es tanqui i la situació es converteixi en normal i en l’estat original.
El circuit START / STOP basat en l'IC 555 explicat anteriorment va ser creat amb èxit per un dels àvids lectors d'aquest bloc, el senyor Chandan. Els valors provats dels components R i C tal com es mostren a les figures serveixen per produir un retard de 2 segons en ON per als commutadors d’arrencada / parada pertinents. Els valors van ser suggerits pel senyor Chandan.
Anterior: Feu aigua potable gratuïta amb aigua de mar Següent: Feu aquest sistema de rentadora senzill